
-10%






Multi Rotor Parts
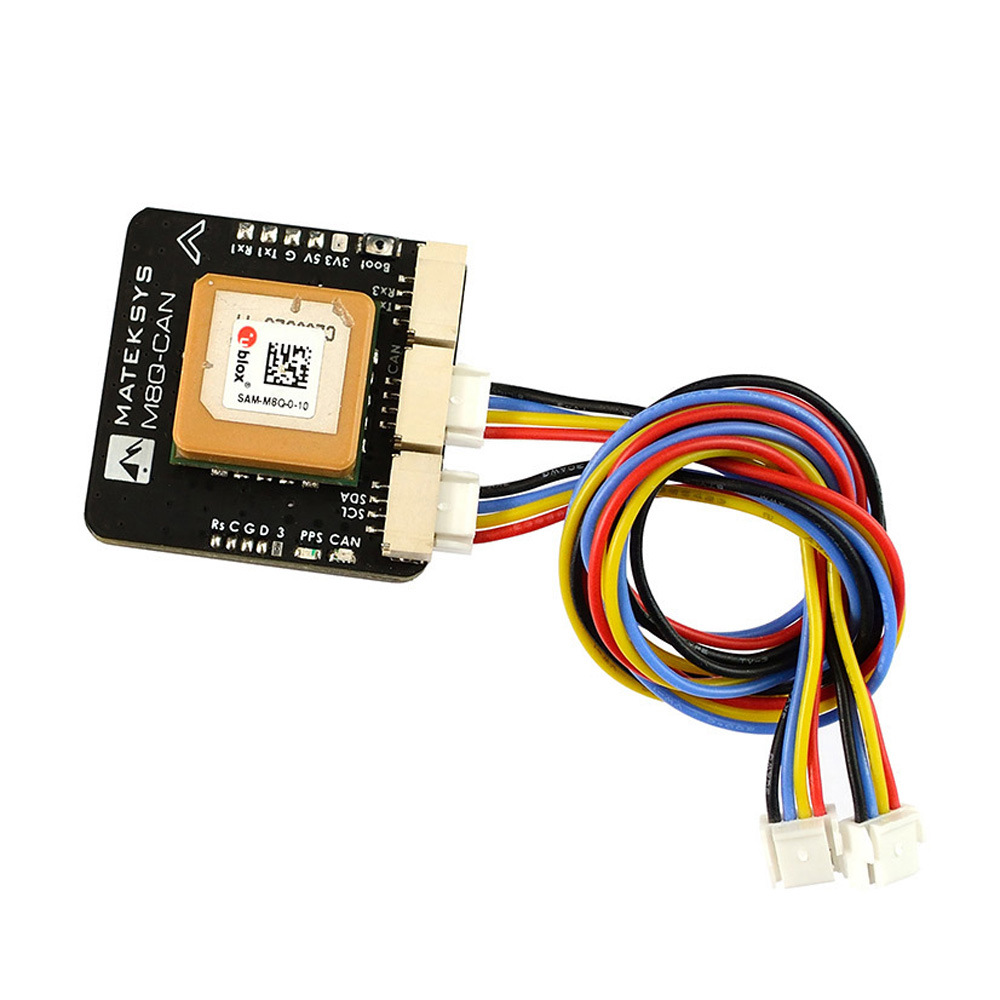
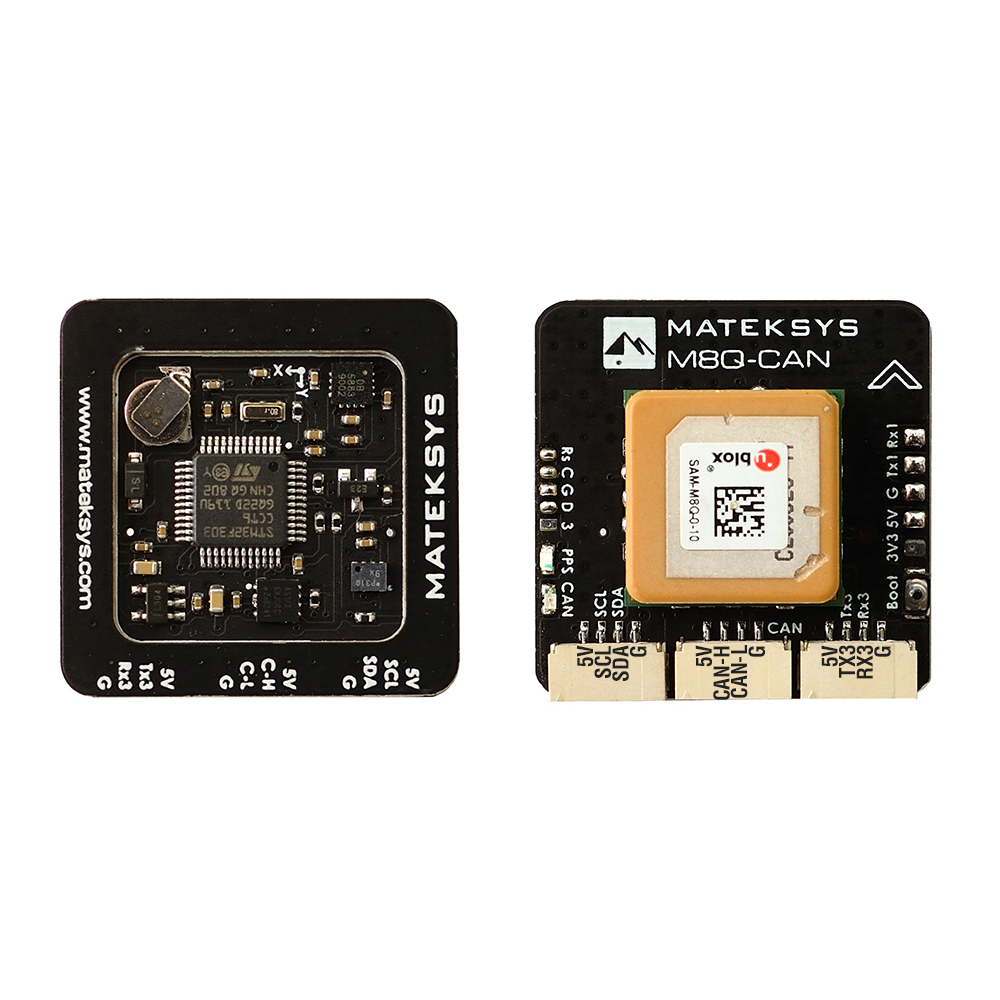
Matek Systems GPS M8Q-CAN UAVCAN GPS Module support COMPASS Galileo for RC Drone FPV Racing Multirotor
- SKU : 1744522
- Condition : New
- Brand : BAXIN
- Processing Time : Ships Within 24-48 Hours
- Return Policy : 30-day refund or replacement
$71.99 $79.99
Specifications
- ArduPilot AP_Periph F303 CAN node
- GPS SAM-M8Q (GPS, GLONASS, Galileo)
- Magnetic Compass QMC5883L
- Barometer DPS310
- UART1, Firmware update
- UART2, onboard GPS
- UART3, MSP Protocol (To be supported)
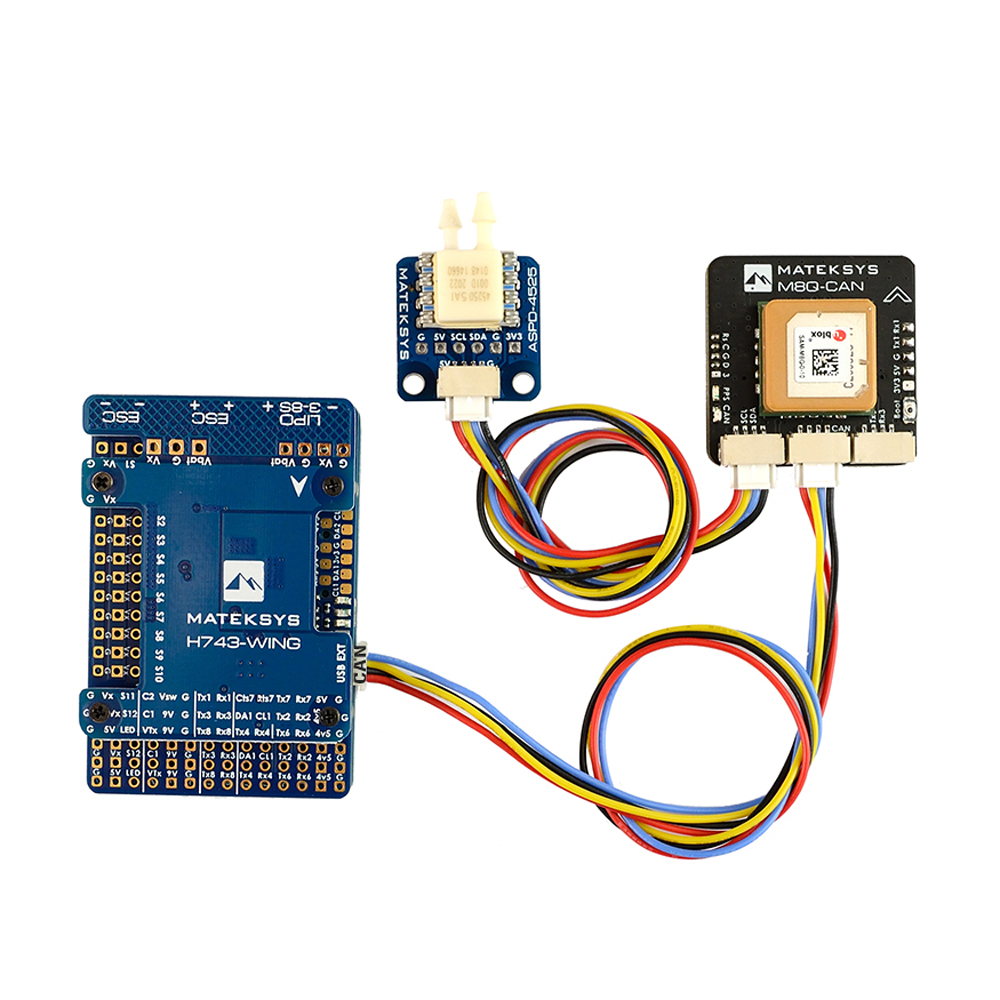
- CAN, UAVCAN Protocol
- I2C, onboard QMC5883L & DPS310
- I2C JST-GH connector, external AirSpeed sensor
- CAN bootloader LED, Blue
- Fast blinking, No communication between CAN node and Flight Controllers
- Slow blinking, Communicating between CAN node and Flight Controllers
- GPS PPS LED, Green
- blinking(1Hz) when GPS has 3D fixed
- Boot button
- Input voltage range: 4~6V
- Power consumption: 100mA
- Operating Temperatures: -20~80 ┬░C
- 29mm*29mm*9.7mm
- 11.3g
Includes
- 1x M8Q-CAN
- 2x JST-GH-4P to JST-GH-4P 20cm silicon wire
Tips
- u-blox M8Q series has no external flash memory
- Compass Alignment(Arrow forward and flat mounting):
Ardupilot/Mission Planner: Rotation None - Make sure to have compass/magnetometer 10cm away from power lines/ESC/motors/iron based material
- The scratches on ceramic antenna are the result of tuning the antenna by ublox.
- UART3 MSP Protocol is not implemented for now.
MPS Parameters
ArduPilot (latest firmware after Sep.09)
- Serialx_PROTOCOL = 32 (MSP) where x is the SERIAL port used for connection on autopilot.
- GPS TYPE = 19 (MSP)
- GND_PROBE_EXT = 4096 (MSP Baro)
- GND_PRIMARY = 1 (If you want to use MSP baro as primary baro, otherwise leave as default)
- COMPASS_TYPEMASK 0 (make sure MSP bit is not checked)
INAV (since 2.6)
- In ports tab, Enable MSP on corresponding UART that M8Q-CAN connected
- feature GPS
- set gps_provider = MSP
- set mag_hardware = MSP
- set baro_hardware = MSP
-
ArduPilot hwdef f303-MatekGPS
-
Firmware https://firmware.ardupilot.org/AP_Periph/latest/f303-MatekGPS/
User Manual, Click Here





















There are no reviews yet.